Building a DIY UAV Submarine
DIY Submarine Project
After building a drone from scratch where I encountered significant challenges with extreme vibration and poor sensor build quality, I decided to take on a new simpler challenge: creating a small autonomous submarine. This project aims to apply the lessons I learned from my drone project, particularly implementing a slower control cycle to improve stability. I'm adapting these principles to an underwater environment where GPS is unavailable, focusing on more reliable sensor readings and robust navigation systems.
Paused and still in the making
I haven't yet find time to continue this project. But I decided to keep this page up to date.
The problem
I want to navigate the a submarine without GPS. (Only using GPS for syncing at key points). Ideally the ship can navigate through narrow channels. Its an interesting challenge since the sensor obviously will face drift over time. it would be interesting to see how much it can be corrected with a proper filter.
Current state
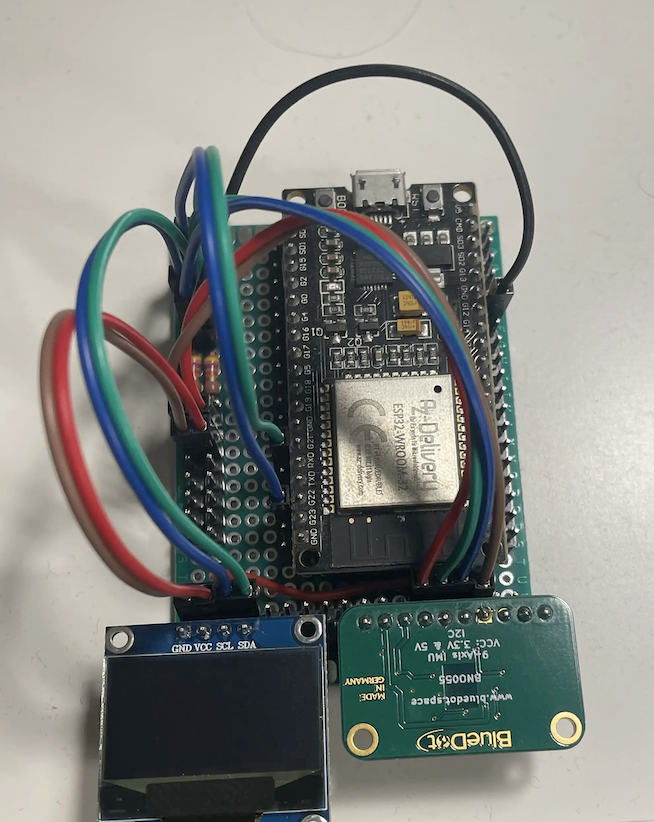
I built small test setups for example for communication, via SMS. Or setting up different sensors. I also experimented out with small pumps to compress air in a tank. Here an example of a testbed for the IMU.
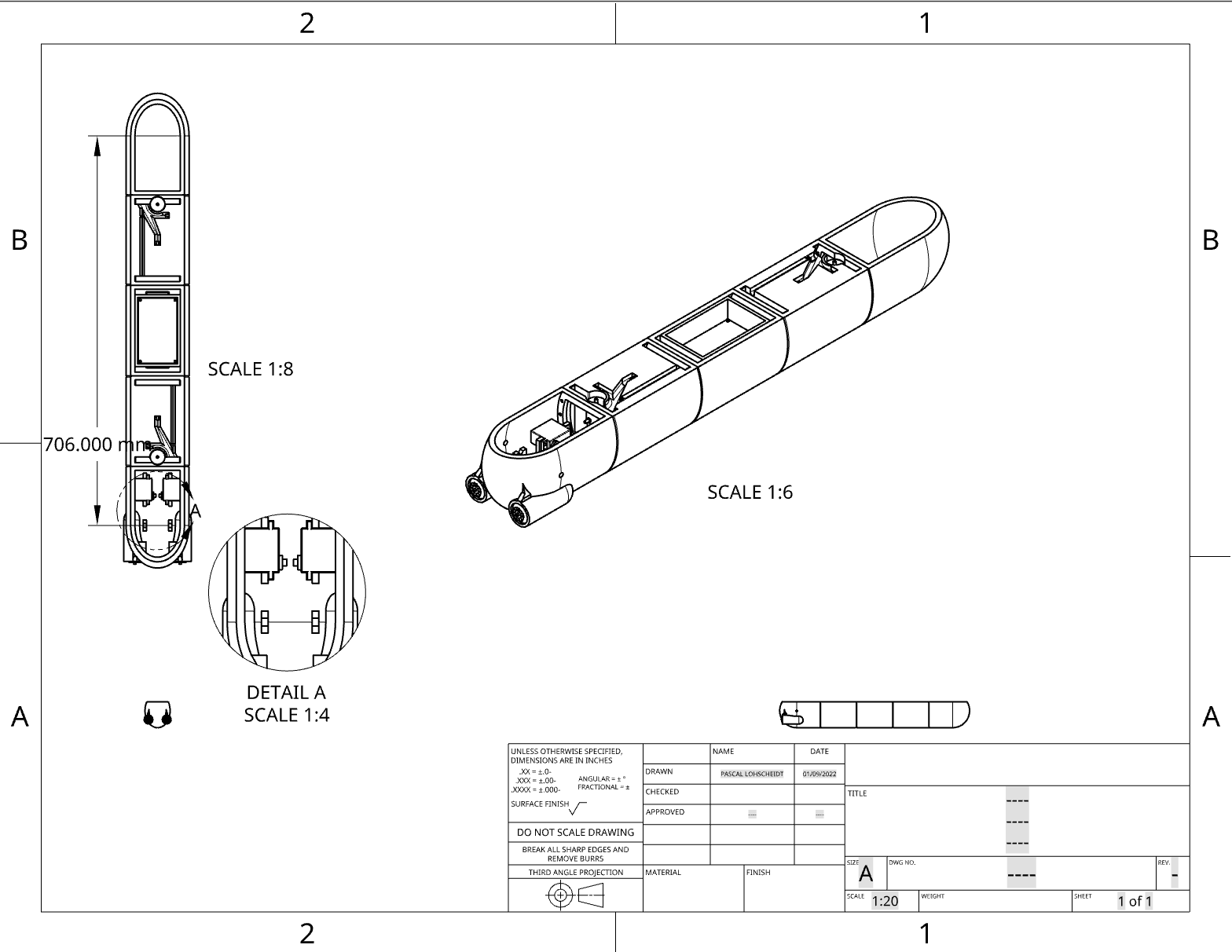
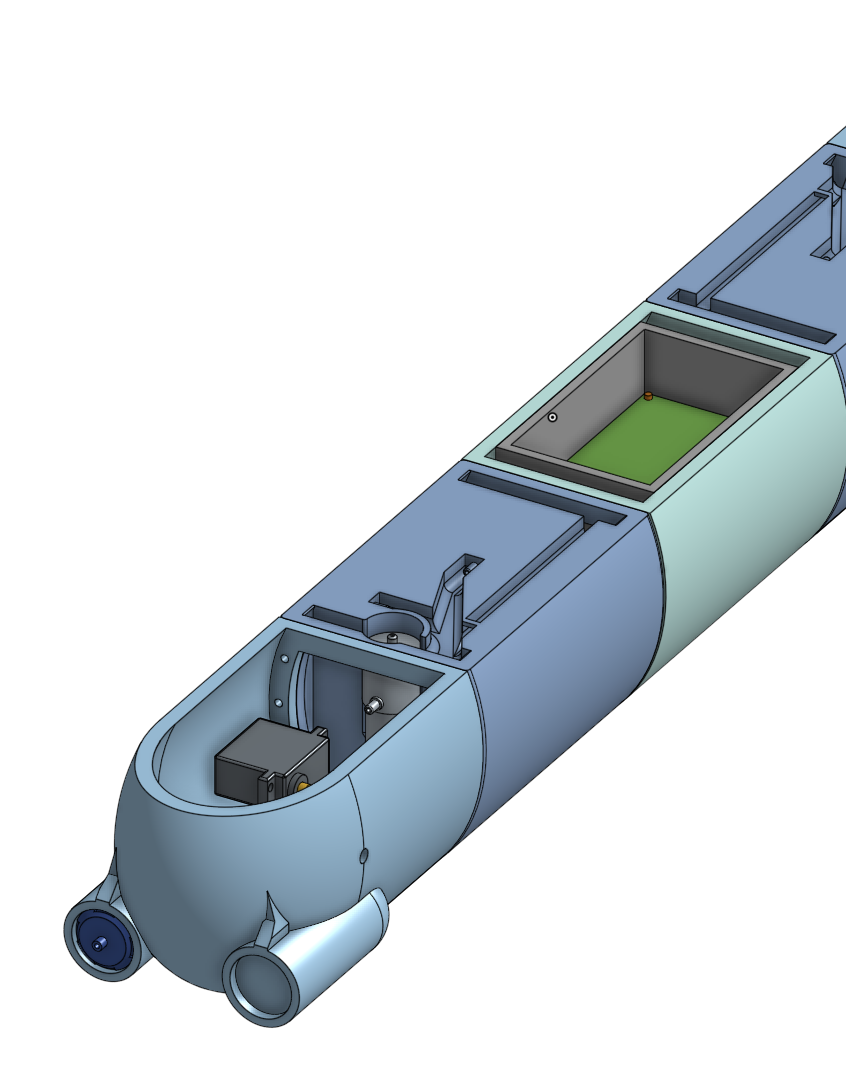
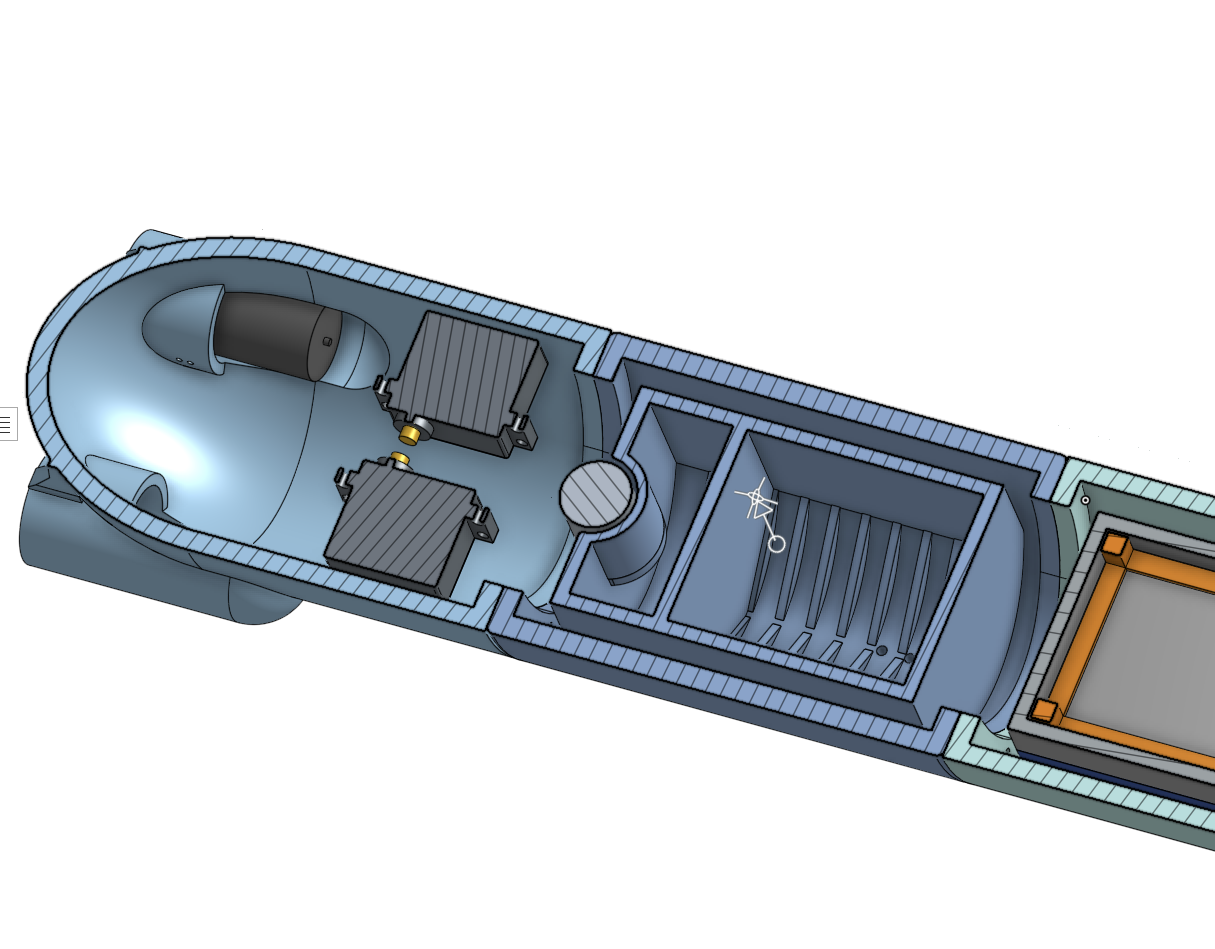
Current concept state
Due to the limited space in my printer, I decided to build the sub in segments and try to make them airtight.